728x90
우선 Unity에서 OpenCV를 사용할 수 있도록 package를 Install 해야합니다.
PCA를 사용하는 OpenCV코드는 아래와 같습니다!!
//PCA 수행 PCA(pac진행할 행렬, 저장할 행렬, 각 데이터 표현 방법)
PCA pca = new PCA(Center_mat, new Mat(), PCA.Flags.DataAsRow);
위 코드의 Center_mat의 경우 아래의 코드를 따르게 됩니다.
// pca를 하기 위한 데이터 중심이동
Mat Center_mat = new Mat(pointList.Count, 3, MatType.CV_32F);
for (int j = 0; j < Center_mat.Rows; j++)
{
// Center_mat.Set<float>(row, column, value);
Center_mat.Set<float>(j, 0, pointList[j].x - mean.x);
Center_mat.Set<float>(j, 1, pointList[j].y - mean.y);
Center_mat.Set<float>(j, 2, pointList[j].z - mean.z);
}
다음과 같이 point 정보에 평균을 빼는 구조를 가지는 이유는 PCA가 공분산 행렬에 대해 고유값을 추출하기 때문입니다.
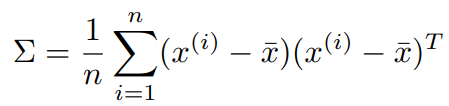
위 수식은 data에 대한 공분산 행렬을 구할때 사용한 수식입니다.
Center_mat에 작성한 코드와 같이 각 data의 값에 평균을 빼는 형태를 볼 수 있으며

unity에 적용한 OpenCV또한 다음 데이터의 mean값을 요구하고 있습니다.
OpenCV에서는 data와 mean을 따로 요구하지만 저는 코드에서 볼 수 있듯 미리 평균을 빼준값을 data에 넣고 mean 부분은 빈 matrix를 적용했습니다.
위 코드를 사용하여 LiDAR pointcloud에 적용하여 시각화 한 결과

Eigen Vector에 대한 내용은 색칠된 화살표로 설명되고 있습니다. 여기서 PC1은 eigen value가 가장 큰 eigen vector방향을 뜻합니다. 따라서 사진에서 파란색 점들이 뭉쳐있는 LiDAR pointcloud의 경우 PC1 방향의 벡터가 내적했을 때 loss가 가장 적은 방향을 의미합니다!!
'LiDAR' 카테고리의 다른 글
| Unity상에서 PCA를 사용해 LiDAR Pointcloud의 바닥을 없애보자 (0) | 2024.03.28 |
|---|---|
| Unity에서 LiDAR Pointcloud에 DBScan을 해보자 (0) | 2024.03.28 |
| Unity에서 Voxel grid sampling을 하자 (0) | 2024.03.28 |
| LiDAR PointCloud 정보를 Unity Sphere obj에 대입해보자 (0) | 2024.03.28 |
| Ouster LiDAR 정보를 Unity로 보내기 (0) | 2024.03.08 |
